R3DVi Robot 3D Vision
Julkaistu:2019-03-29R3DVi on 3D-konenäköratkaisu kappaleiden paikannukseen robottisovelluksissa. Se yhdistää luotettavan ja tarkan paikannuksen suoraviivaiseen integrointiin robotin ohjelmassa. R3DVi soveltuu erinomaisesti esim. kohteisiin, joissa poimittavat kappaleet ovat lavalla.
R3DVi-ratkaisu koostuu kahdesta ohjelmasta:
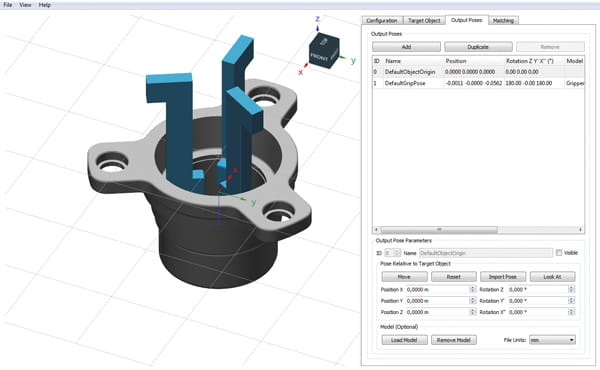
Job Configurator -ohjelmassa määritellään poimintakonfiguraatio havainnollisessa graafisessa käyttöliittymässä. Paikannettava kappale opetetaan tuomalla ohjelmaan sen 3D-malli, joka saadaan esimerkiksi CAD-ohjelmistosta. Kappaleeseen voidaan määritellä useita eri tarttumisasentoja tai muita robottisovelluksessa hyödynnettäviä pisteitä. Paikannukseen voidaan lisäksi määritellä rajoituksia, joilla tuloksia voidaan hylätä sekä sääntö, joka määrittelee, mikä löydetyistä kappaleista poimitaan.
Runtime -ohjelma vastaa järjestelmän automaattisesta toiminnasta. Job Configurator-ohjelmassa luodut poimintakonfiguraatiot tuodaan Runtime-ohjelmaan, jonka jälkeen robotti voi valita halutun Job:in ajoon. Automaattiajossa Runtime-ohjelma kommunikoi robotin kanssa prosessoimalla robotilta tulevia pyyntöjä ja palauttamalla tulokset. Paikannuksen tuloksena palautetaan halutun, malliin ennalta määritetyn pisteen, kuten tarttumisasennon, koordinaatit ja rotaatio. Käyttöönottovaiheessa suoritetun kalibroinnin ansiosta tulokset ovat suoraan halutussa robotin koordinaatistossa.
TuoteuutisetOminaisuuksia:
- Robottikommunikaatiorajapinta
- 3D-skannerirajapinta esimerkiksi Photoneo PhoXi-skannereille
- Kalibrointi robotin koordinaatistoon
- Kappaleiden opetus 3D-malleista
- Tarttumisasennon havainnollinen määrittäminen
- Kappaleiden paikannus skannerin tuottamasta pistepilvestä
- Mahdollisuus kappaleen asennon mittaukseen tartunnan jälkeen
- Graafinen käyttöliittymä kosketusnäytölle
- Paikannuksen 3D-visualisointi

lisätiedot




