Hyvä asiakkaamme, olemme siirtyneet juhannuksen jälkeen kesäaikaan ja palvelemme arkisin klo 8-16. Palvelemme normaalisti taas ma 3.8. Mukavaa kesää!
LATERAL ENGINE
R3DVi on 3D-konenäköratkaisu kappaleiden paikannukseen robottisovelluksissa. Se yhdistää luotettavan ja tarkan paikannuksen suoraviivaiseen integrointiin robotin ohjelmassa. R3DVi soveltuu erinomaisesti esimerkiksi kohteisiin, joissa poimittavat kappaleet ovat lavalla.
R3DVi-ratkaisu koostuu kahdesta ohjelmasta:
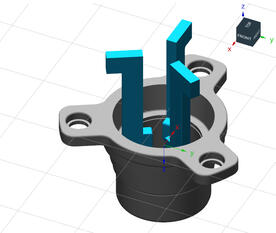
R3DVi Job Configurator -ohjelmassa määritellään poimintakonfiguraatio havainnollisessa graafisessa käyttöliittymässä. Paikannettava kappale opetetaan tuomalla ohjelmaan sen 3D-malli, joka saadaan esimerkiksi CAD-ohjelmistosta. Kappaleeseen voidaan määritellä useita eri tarttumisasentoja tai muita robottisovelluksessa hyödynnettäviä pisteitä. Paikannukseen voidaan lisäksi määritellä rajoituksia, joilla tuloksia voidaan hylätä, ja sääntö, joka määrittelee, mikä löydetyistä kappaleista poimitaan.
R3DVi Runtime -ohjelma vastaa järjestelmän automaattisesta toiminnasta. Job Configurator -ohjelmassa luodut poimintakonfiguraatiot tuodaan Runtime-ohjelmaan, jonka jälkeen robotti voi valita halutun Job:in ajoon. Automaattiajossa Runtime-ohjelma kommunikoi robotin kanssa prosessoimalla robotilta tulevia pyyntöjä ja palauttamalla tulokset. Paikannuksen tuloksena palautetaan halutun, malliin ennalta määritetyn pisteen, kuten tarttumisasennon, koordinaatit ja rotaatio. Käyttöönottovaiheessa suoritetun kalibroinnin ansiosta tulokset ovat suoraan halutussa robotin koordinaatistossa.
Ominaisuuksia:
- Robottikommunikaatiorajapinta
- 3D-skannerirajapinta esimerkiksi Photoneo PhoXi-skannereille
- Kalibrointi robotin koordinaatistoon
- Kappaleiden opetus 3D-malleista
- Tarttumisasennon havainnollinen määrittäminen
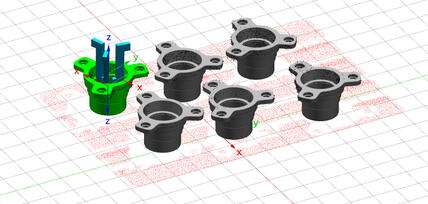
- Kappaleiden paikannus skannerin tuottamasta pistepilvestä
- Mahdollisuus kappaleen asennon mittaukseen tartunnan jälkeen
- Graafinen käyttöliittymä kosketusnäytölle
- Paikannuksen 3D-visualisointi

R3DVi on 3D-konenäköratkaisu kappaleiden paikannukseen robottisovelluksissa. Se yhdistää luotettavan ja tarkan paikannuksen suoraviivaiseen integrointiin robotin ohjelmassa. R3DVi soveltuu erinomaisesti esimerkiksi kohteisiin, joissa poimittavat kappaleet ovat lavalla.
R3DVi-ratkaisu koostuu kahdesta ohjelmasta:
R3DVi Job Configurator -ohjelmassa määritellään poimintakonfiguraatio havainnollisessa graafisessa käyttöliittymässä. Paikannettava kappale opetetaan tuomalla ohjelmaan sen 3D-malli, joka saadaan esimerkiksi CAD-ohjelmistosta. Kappaleeseen voidaan määritellä useita eri tarttumisasentoja tai muita robottisovelluksessa hyödynnettäviä pisteitä. Paikannukseen voidaan lisäksi määritellä rajoituksia, joilla tuloksia voidaan hylätä, ja sääntö, joka määrittelee, mikä löydetyistä kappaleista poimitaan.
R3DVi Runtime -ohjelma vastaa järjestelmän automaattisesta toiminnasta. Job Configurator -ohjelmassa luodut poimintakonfiguraatiot tuodaan Runtime-ohjelmaan, jonka jälkeen robotti voi valita halutun Job:in ajoon. Automaattiajossa Runtime-ohjelma kommunikoi robotin kanssa prosessoimalla robotilta tulevia pyyntöjä ja palauttamalla tulokset. Paikannuksen tuloksena palautetaan halutun, malliin ennalta määritetyn pisteen, kuten tarttumisasennon, koordinaatit ja rotaatio. Käyttöönottovaiheessa suoritetun kalibroinnin ansiosta tulokset ovat suoraan halutussa robotin koordinaatistossa.
Ominaisuuksia:
- Robottikommunikaatiorajapinta
- 3D-skannerirajapinta esimerkiksi Photoneo PhoXi-skannereille
- Kalibrointi robotin koordinaatistoon
- Kappaleiden opetus 3D-malleista
- Tarttumisasennon havainnollinen määrittäminen
- Kappaleiden paikannus skannerin tuottamasta pistepilvestä
- Mahdollisuus kappaleen asennon mittaukseen tartunnan jälkeen
- Graafinen käyttöliittymä kosketusnäytölle
- Paikannuksen 3D-visualisointi
You already added this product. Choose whether to increase quantity on the existing row or add the product as a new row.

Teimme yhteistyössä Avertas Robotics kanssa siirrettävän konepalvelusolun, jossa sorvin työstökappaleet tunnistetaan, poimitaan ja syötetään konenäöllä.

Bin Picking Studio -ohjelmisto ja Phoxi 3D -skanneri ohjaavat messuilla esillä olevaa konepalvelusolua. Tutustu!

Pylon vToolsin avulla asiakkaat voivat käyttää erilaisia älykkäitä ja helppokäyttöisiä kuvankäsittelytoimintoja sovelluksissaan.

Lavoja purkavat robotit ovat seuraava iso askel logistiikan puolella. Tutustu Photoneon vallankumoukselliseen lavanpurkuohjelmistoon DEPALiin.

Kine Robotics Oy kehitti 3D-kuvantamiseen perustuvan järjestelmän tuotannon automatisoimiseksi leipomoon. Nyt leivät pakataan laatikkohin automaattisesti!

Basler on laajentanut tuotevalikoimaansa korkealaatuisiin valaistuksen komponentteihin, jotka sopivat täydellisesti yhteen heidän suosituimpien kameramalliensa kanssa ja ne yksinkertaistavat huomattavasti kuvantamisjärjestelmän suunnittelua.



