Hyvä asiakkaamme, olemme siirtyneet juhannuksen jälkeen kesäaikaan ja palvelemme arkisin klo 8-16. Palvelemme normaalisti taas ma 3.8. Mukavaa kesää!
Helsinkiläisen Temet International Oy:n tehtaassa käy kuhina. OEM:n Miikka Himanka yhdessä Temetin tuotantojohtajan Kalle Katajan (kuvassa vasemmalla) ja työnjohtajan Heikki Stigellin (oikealla) kanssa tarkistavat uuden robottisolun toimintaa. Yaskawa Finland Oy valmisti Temet Internationalille robottisolun, johon integroitiin OEM Finland Oy:n toimittama Photoneo Bin Picking studio -sovellus.
Asiakascase
Temet International on suomalainen väestönsuojien, kriisiajan tuotteiden sekä teollisuuden paineventtiilien valmistaja. Yritys on viime vuosina kehittänyt toimintaansa ja automatisoinut tuotantoaan raskaalla kädellä, minkä ansiosta myös tuotantomäärät ovat kasvaneet.
Yaskawa Finland Oy yrityksenä keskittyy toimittamaan Yaskawan valmistamia teollisuusrobotteja ja niiden ympärille koottuja tuotantojärjestelmiä eripuolille suomalaista teollisuutta. Yaskawa Finland Oy toimi tässä projektissa integraattorina. Rooli oli luonnollinen, koska uusi 3D-konenäkö integroitiin osaksi Yaskawan jo aiemmin toimittamaa järjestelmää.
OEM toimitti itse laitteiston ja Yaskawa vastasi sen asennuksesta ja käyttöönotosta sekä oheislaitteista. Yaskawa on Euroopassa käyttänyt Photoneon tuotteita ja todenneet ne ne toimiviksi.

Kun tuotantomäärät kasvoivat, kasvoi myös automatisoitua työvaihetta varten tehtävä osien pinoaminen lavoille tarkkoihin kasoihin. Tämän työn fyysisyys oli yksi syy, miksi projektiin lähdettiin. ”Halusimme välttää tällaisen epäergonomisen toistotyön teettämistä työntekijöillä, joten etsimme ratkaisuksi konenäkösovellusta”, kertoo Kataja.
Photoneon 3D-poiminnan integroiminen soluun muutti sen, että kappaleiden tarkka pinoaminen jäi työvaiheena pois. Tuotteet voidaan siirtää sekalavoilla leikkurilta suoraan särmärille, joka jatkokäsittelee tuotteet. Ratkaisu nopeuttaa tuotantoa ja poistaa kokonaan yhden arvoa tuottamattoman työvaiheen.


Tämä oli ensimmäinen Yaskawa-Photoneo käyttöönotto Suomessa. Konenäköprojekteille tyypillisten alkuhaasteiden jälkeen projekti saatiin hyvin toteutettua. Koska kyseinen konenäköjärjestelmä ei toistaiseksi tue robotin 7:ää akselia (lineaarirata), jouduttiin sen ohjelmointi rakentamaan Yaskawan järjestelmään. Tämä vaati paljon kehitystyötä, mutta lopulta se saatiin toimimaan.
”Projektista erikoisen teki robotin 7:n akselin lisäksi se, että rakensimme 3D-skannerille 3 eri kiinteää paikkaa. Robotti siirtää solussa skannerin robottiohjelmassa määritettyyn paikkaan. Kiinnitys tapahtuu telineisiin 0-pistekiinnikkeiden avulla. Meidän käsityksemme mukaan tällaista ei ole toteutettu muualla.” kertoo Yaskawan myyntipäällikkö Aku Laakso.
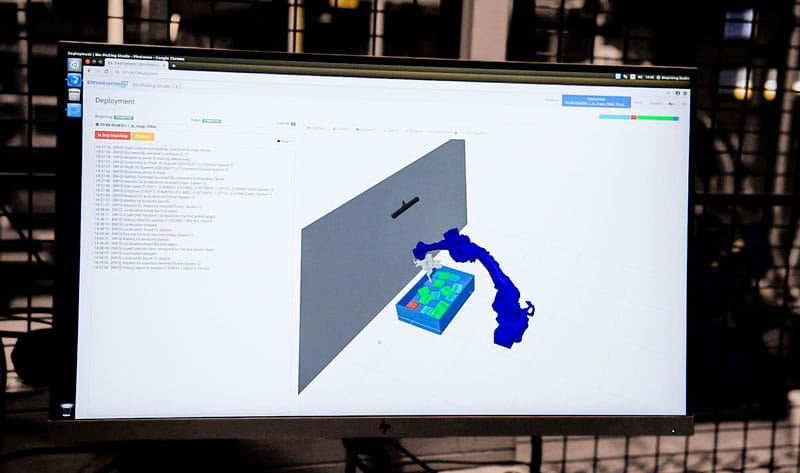
Solussa on siis kolme eri sijaintia, joihin voidaan tuoda sekalava. 3D-skanneri tunnistaa tuotteiden sijainnin ja asennon, mikä jälkeen robotti poimii kappaleen. Poiminnan jälkeen kappaleet särmätään ja ladotaan lavalle pinoiksi odottamaan seuraavaa työvaihetta. Kun ensimmäinen sekalava tyhjenee, robotti siirtää skannerin toiseen sijaintiin ja työ jatkuu.
”Skannerin käyttöönotto oli viime lokamarraskuussa, ja viimeiset testit saatiin tehtyä pari viikkoa sitten”, kertoo Kataja. ”Seuraava etappi on uusien tartuntatyökalujen suunnittelu ja ohjelmointi, jotta saadaan lisättyä uusia tuotteita solun käsiteltäväksi.” Jatkossa automaatiota ja konenäköä on tarkoitus lisätä myös muihin tuotannon työvaiheisiin.


3D-kuvantaminen


UUTUUS!




