PHOTONEO
3D-ohjelmistoratkaisut
UUTUUS!
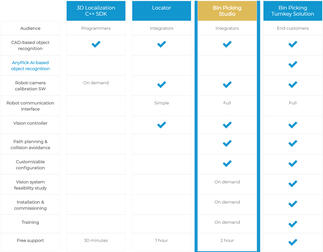
Photoneo tarjoaa ohelmistoratkaisuja moniin käyttötarpeisiin. Ohjelmistokehittäjät voivat integroida tuotteet omiin järjestelmiinsä rajapintojen avulla, kun taas Bin Picking Studio tarjoaa valmiin paketin käyttöönotettavaksi loppuasiakkaille.
Bin Picking Studio
Kiiltävien, lajittelemattomien metalliesineiden poiminta (ns. random bin picking) on Photoneon leipälaji.
Bin Picking Studio on suunniteltu helpottamaan automatisointia ja laskemaan tuotteiden poiminnan kustannuksia. Web-käyttöliittymän ja useiden esimerkkien avulla robotin ja kameran konfiguroiminen käyttöön on helppoa ja nopeaa; Bin Picking Studion ansiosta käyttäjän ei tarvitse kirjoittaa riviäkään koodia.
Ohjelmasta on saatavana kaksi versiota. FULL jossa ohjelma laskee poimintareitin valmiiksi robotille sekä LITE jossa robotille palautetaan poimittavan kappaleen paikka ja poimintareitti määritellään robotin ohjelmassa.
3D Localization C++ SDK
Photoneon SDK ohjelmistokehittäjille, jotka haluavat itse kehittää ohjelmistonsa ja robottikommunikaation rajapintansa. Localization SDK sisältää Photoneon CAD-pohjaisen objektintunnistuksen ja sekä kappaleenpaikoituksen työkalut. Localization SDK:n avulla voidaan suorittaa kaikki samat toiminnot kuin täyden Bin Picking Studion, mutta käyttäjän tulee toteuttaa toiminnallisuus itsenäisesti.
AnyPick - Bin Picking with AI
AnyPickin myötä Photoneo lanseeraa ensimmäisen tekoälypohjaisen ohjelmistonsa tunnuslauseella ”We can pick anything”. AnyPick mahdollistaa epäsäännöllisen muotoisten kappaleiden poiminnan ilman CAD-mallista opetusta. Tekoälypohjainen kappaleentunnistus pystyy paikoittamaan ja poimimaan minkä tahansa yli 1x1 cm kokoisen kohteen, muodosta riippumatta. AnyPickin jopa 500 kpl/h poimintanopeus tarjoaa ennennäkemättömiä mahdollisuuksia esim. varastoautomaation ja verkkokauppalogistiikan tarpeisiin.
Depalletizer
Ohjelmalla voidaan tehdä lavanpurku automaattisesti tai puoliautomaattisesti. Laatikoilla täytetty lava sijoitetaan robotin ulottuville jolloin 3D-skanneri (PhoXi 3D Scanner) skannaa lavan ja lähettää 3D-datan käsiteltäväksi Vision-kontrollerille jossa 3D-tiedot käsitellään koneoppimisalgoritmilla. Esiopetettu neuroverkko pystyy tunnistamaan yksittäiset laattikot nopeasti ja kommunikoi poimittavat laatikot robotille.
Automaattisessa ajossa robotille lasketaan myös valmiit liikeradat poiminnalle jolloin robotin ohjelmointia ei tarvita.
Laatikoiden ei tarvitse olla ennalta määrätyn muotoisia vaan tunnistus perustuu yli 5000 esiopetettuun malliin. Ohjelmisto pystyy jopa 99,7% poimintatuloksiin ja voi käsitellä jopa 1,2 x 1,2 x 2.5m kuormalavoja.
Luotettava tunnistus voidaan tehdä 10cm x 10cm ja sitä suuremmille laatikoille ja laatikon suurimman painon määrittelee käytettävä robotti. Ohjelmisto pystyy jopa 1000 laatikon käsittelyyn tunnissa.
Ohjelman kommunikointi tukee ABB, Fanuc, Yaskawa robotteja mutta muut robottimerkkit ovat mahdollisia.
Sisältää 3D-skannerin, näköohjaimet ja tartuntatyökalun
- 3D Localization C++ SDK
- Bin Picking Studio
- AnyPick - Poimi mitä tahansa
- Depalletization



Valitse tuote
Tekniset tiedot
Tiedostot

Tuotekuvaus
Photoneo tarjoaa ohelmistoratkaisuja moniin käyttötarpeisiin. Ohjelmistokehittäjät voivat integroida tuotteet omiin järjestelmiinsä rajapintojen avulla, kun taas Bin Picking Studio tarjoaa valmiin paketin käyttöönotettavaksi loppuasiakkaille.
Bin Picking Studio
Kiiltävien, lajittelemattomien metalliesineiden poiminta (ns. random bin picking) on Photoneon leipälaji.
Bin Picking Studio on suunniteltu helpottamaan automatisointia ja laskemaan tuotteiden poiminnan kustannuksia. Web-käyttöliittymän ja useiden esimerkkien avulla robotin ja kameran konfiguroiminen käyttöön on helppoa ja nopeaa; Bin Picking Studion ansiosta käyttäjän ei tarvitse kirjoittaa riviäkään koodia.
Ohjelmasta on saatavana kaksi versiota. FULL jossa ohjelma laskee poimintareitin valmiiksi robotille sekä LITE jossa robotille palautetaan poimittavan kappaleen paikka ja poimintareitti määritellään robotin ohjelmassa.
3D Localization C++ SDK
Photoneon SDK ohjelmistokehittäjille, jotka haluavat itse kehittää ohjelmistonsa ja robottikommunikaation rajapintansa. Localization SDK sisältää Photoneon CAD-pohjaisen objektintunnistuksen ja sekä kappaleenpaikoituksen työkalut. Localization SDK:n avulla voidaan suorittaa kaikki samat toiminnot kuin täyden Bin Picking Studion, mutta käyttäjän tulee toteuttaa toiminnallisuus itsenäisesti.
AnyPick - Bin Picking with AI
AnyPickin myötä Photoneo lanseeraa ensimmäisen tekoälypohjaisen ohjelmistonsa tunnuslauseella ”We can pick anything”. AnyPick mahdollistaa epäsäännöllisen muotoisten kappaleiden poiminnan ilman CAD-mallista opetusta. Tekoälypohjainen kappaleentunnistus pystyy paikoittamaan ja poimimaan minkä tahansa yli 1x1 cm kokoisen kohteen, muodosta riippumatta. AnyPickin jopa 500 kpl/h poimintanopeus tarjoaa ennennäkemättömiä mahdollisuuksia esim. varastoautomaation ja verkkokauppalogistiikan tarpeisiin.
Depalletizer
Ohjelmalla voidaan tehdä lavanpurku automaattisesti tai puoliautomaattisesti. Laatikoilla täytetty lava sijoitetaan robotin ulottuville jolloin 3D-skanneri (PhoXi 3D Scanner) skannaa lavan ja lähettää 3D-datan käsiteltäväksi Vision-kontrollerille jossa 3D-tiedot käsitellään koneoppimisalgoritmilla. Esiopetettu neuroverkko pystyy tunnistamaan yksittäiset laattikot nopeasti ja kommunikoi poimittavat laatikot robotille.
Automaattisessa ajossa robotille lasketaan myös valmiit liikeradat poiminnalle jolloin robotin ohjelmointia ei tarvita.
Laatikoiden ei tarvitse olla ennalta määrätyn muotoisia vaan tunnistus perustuu yli 5000 esiopetettuun malliin. Ohjelmisto pystyy jopa 99,7% poimintatuloksiin ja voi käsitellä jopa 1,2 x 1,2 x 2.5m kuormalavoja.
Luotettava tunnistus voidaan tehdä 10cm x 10cm ja sitä suuremmille laatikoille ja laatikon suurimman painon määrittelee käytettävä robotti. Ohjelmisto pystyy jopa 1000 laatikon käsittelyyn tunnissa.
Ohjelman kommunikointi tukee ABB, Fanuc, Yaskawa robotteja mutta muut robottimerkkit ovat mahdollisia.
Sisältää 3D-skannerin, näköohjaimet ja tartuntatyökalun
Lisää luettavaa

Ultrakompakti konepalvelusolu
Teimme yhteistyössä Avertas Robotics kanssa siirrettävän konepalvelusolun, jossa sorvin työstökappaleet tunnistetaan, poimitaan ja syötetään konenäöllä.

Photoneo Phoxi 3D-skanneri ja Bin Picking Studio -ohjelmisto
Bin Picking Studio -ohjelmisto ja Phoxi 3D -skanneri ohjaavat messuilla esillä olevaa konepalvelusolua. Tutustu!

Basler Pylon vTools
Pylon vToolsin avulla asiakkaat voivat käyttää erilaisia älykkäitä ja helppokäyttöisiä kuvankäsittelytoimintoja sovelluksissaan.

Anna robottisi hoitaa laatikoiden poimiminen
Lavoja purkavat robotit ovat seuraava iso askel logistiikan puolella. Tutustu Photoneon vallankumoukselliseen lavanpurkuohjelmistoon DEPALiin.

3D-ohjattu robotiikka leipomoalalla
Kine Robotics Oy kehitti 3D-kuvantamiseen perustuvan järjestelmän tuotannon automatisoimiseksi leipomoon. Nyt leivät pakataan laatikkohin automaattisesti!

Valo-ohjain kuvantamissovelluksiin
Basler on laajentanut tuotevalikoimaansa korkealaatuisiin valaistuksen komponentteihin, jotka sopivat täydellisesti yhteen heidän suosituimpien kameramalliensa kanssa ja ne yksinkertaistavat huomattavasti kuvantamisjärjestelmän suunnittelua.

