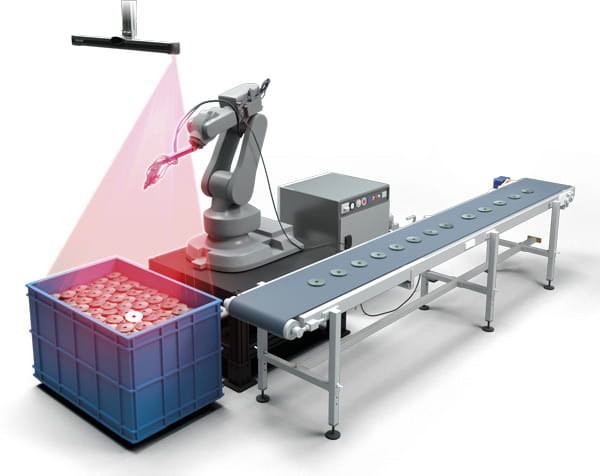
Anna robotillesi silmät ja älykkyys suorittaa kappaleen poiminta suoraan laatikosta. Photoneon uuden ohjelmistoratkaisun ansiosta useimmat robotit voidaan konfiguroida nykyaikaiseksi bin-picking sovellukseksi.
Photoneon 3D-skannereilla ja Bin Picking Studio -ohjelmistolla ohjaat koko robottisolua. Aloita valitsemalla robotti ja tartuntatyökalu. Tuo CAD-mallit kappaleesta, jonka haluat poimia ja
määritä tartuntapisteet. Kohde skannataan ja kappaleet poimitaan yksitellen - nopeasti ja tarkasti. 3D-järjestelmä tunnistaa satunnaisesti sijoitetut kappaleet suurelta jopa 2.5m kuvausalalta. Eri asennoissa olevien kappaleiden poiminta ilman törmäyksiä on mahdollista ohjelmassa olevan dynaamisen robotin ohjauksen ansiosta. Photoneo tarjoaa valmiit rajapinta-tiedostot useimmille robottimalleille.voidaan konfiguroida nykyaikaiseksi bin-picking sovellukseksi.


UUTUUS!



Asiakaspalvelumme vastaa kysymyksiin ja etsii ratkaisut ongelmiin. Heille voit jättää myös tilauksesi.



